Tugas 2 (Aplikasi Sensor Suhu dan LED)
KIPAS ANGIN LAPTOP OTOMATIS DENGAN INPUTAN SUHU
2. Tujuan [Kembali]
1. Untuk mendinginkan laptop dengan cara menghidupkan FanDC pada saat laptop panas
2. Menyelesaikan Tugas 1 Mata kuliah Mikroprosesor & Mikrokontroller
3. Alat dan Bahan [Kembali]
4. Landasan Teori [kembali]





1. Arduino
Arduino adalah pengendali mikro single-board yang bersifat opensource, diturunkan dari Wiring platform, dirancang untuk memudahkan penggunaan elektronik dalam berbagai bidang. Hardware arduino memiliki prosesor Atmel AVR dan software arduino memiliki bahasa pemrograman C. Memori yang dimiliki oleh Arduino Uno sebagai berikut : Flash Memory sebesar 32KB, SRAM sebesar 2KB, dan EEPROM sebesar 1KB. Clock pada board Uno menggunakan XTAL dengan frekuensi 16 Mhz. Dari segi daya, Arduino Uno membutuhkan tegangan aktif kisaran 5 volt, sehingga Uno dapat diaktifkan melalui koneksi USB. Arduino Uno memiliki 28 kaki yang sering digunakan. Untuk Digital I/O terdiri dari 14 kaki, kaki 0 sampai kaki 13, dengan 6 kaki mampu memberikan output PWM (kaki 3,5,6,9,10,dan 11). Masing-masing dari 14 kaki digital di Uno beroperasi dengan tegangan maksimum 5 volt dan dapat memberikan atau menerima maksimum 40mA.
Untuk Analog Input terdiri dari 6 kaki, yaitu kaki A0 sampai kaki A5. Kaki Vin merupakan tempat input tegangan saat menggunakan sumber daya eksternal selain USB dan adaptor.Spesifikasi arduino uno R3 dapat dilihat pada tabel:

2. Sensor Suhu LM35
Sensor suhu IC LM 35 merupkan chip IC produksi Natioanal Semiconductor yang berfungsi untuk mengetahui temperature suatu objek atau ruangan dalam bentuk besaran elektrik, atau dapat juga di definisikan sebagai komponen elektronika yang berfungsi untuk mengubah perubahan temperature yang diterima dalam perubahan besaran elektrik. Sensor suhu IC LM35 dapat mengubah perubahan temperature menjadi perubahan tegangan pada bagian outputnya. Sensor suhu IC LM35 membutuhkan sumber tegangan DC +5 volt dan konsumsi arus DC sebesar 60 µA dalam beroperasi. Bentuk fisik sensor suhu LM 35 merupakan chip IC dengan kemasan yang berfariasi, pada umumnya kemasan sensor suhu LM35 adalah kemasan TO-92 seperti terlihat pada gambar dibawah.

Dari gambar diatas dapat diketahui bahwa sensor suhu IC LM35 pada dasarnya memiliki 3 pin yang berfungsi sebagai sumber supply tegangan DC +5 volt, sebagai pin output hasil penginderaan dalam bentuk perubahan tegangan DC pada Vout dan pin untuk Ground.
1. Memiliki sensitivitas suhu, dengan faktor skala linier antara tegangan dan suhu 10 mVolt/ºC, sehingga dapat dikalibrasi langsung dalam celcius.
2. Memiliki ketepatan atau akurasi kalibrasi yaitu 0,5ºC pada suhu 25 ºC seperti terlihat pada gambar 2.2.
3. Memiliki jangkauan maksimal operasi suhu antara -55 ºC sampai +150 ºC.
4. Bekerja pada tegangan 4 sampai 30 volt.
5. Memiliki arus rendah yaitu kurang dari 60 µA.
6. Memiliki pemanasan sendiri yang rendah (low-heating) yaitu kurang dari 0,1 ºC pada udara diam.
7. Memiliki impedansi keluaran yang rendah yaitu 0,1 W untuk beban 1 mA.
8. Memiliki ketidaklinieran hanya sekitar ± ¼ ºC.
Grafik Respon Sensor LM35:


3. LED
LED atau singkatan dari Light Emitting Diode adalah salah satu komponen elektronika yang terbuat dari bahan semi konduktor jenis dioda yang mempu mengeluarkan cahaya. Strukturnya juga sama dengan dioda, tetapi pada LED elektron menerjang sambungan P-N (Positif-Negatif). Untuk mendapatkan emisi cahaya pada semikonduktor, doping yang pakai adalah galium, arsenic dan phosporus. Jenis doping yang berbeda menghasilkan warna cahaya yang berbeda pula.
LED memiliki bentuk fisik seperti gambar berikut:
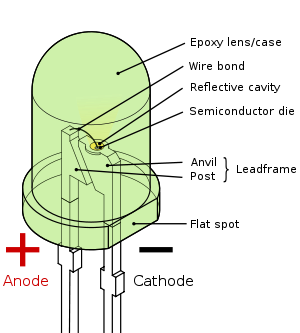

LED memiliki dua kaki yang terbuat dari sejenis kawat. Kawat yang
panjang adalah anoda, sedangkan kawat yang pendek adalah katoda. Coba
perhatikan bagian dalam LED, akan terlihat berbeda antara kiri dan
kanannya. Yang ukurannya lebih besar adalah katoda, atau yang mempunyai
panjang sisi atas yang lebih besar adalah katoda.
Anoda adalah elektroda, bisa berupa logam maupun penghantar listrik
lainnya pada sel elektrokimia yang terpolarisasi jika arus mengalir ke
dalamnya. Arus listrik mengalir berlawanan dengan arah pergerakan
elektron.
Katoda merupakan kebalikan dari anoda. Katoda adalah elektroda dalam sel
elektrokimia yang terpolarisasi jika arus listrik mengalir keluar
darinya.
Cara Kerja LED
Dalam hal ini LED akan menyala bila ada arus listrik mengalir dari anoda ke katoda. Pemasangan kutub LED tidak boleh terebalik karena apabila terbalik kutubnya maka LED tersebut tidak akan menyala. Led memiliki karakteristik berbeda-beda menurut warna yang dihasilkan. Semakin tinggi arus yang mengalir pada LED maka semakin terang pula cahaya yang dihasilkan, namun perlu diperhatikan bahwa besarnya arus yang diperbolehkan adalah 10mA-20mA dan pada tegangan 1,6V – 3,5 V menurut karakter warna yang dihasilkan. Apabila arus yang mengalir lebih dari 20mA maka LED akan terbakar. Untuk menjaga agar LED tidak terbakar perlu kita gunakan resistor sebagai penghambat arus.
Dalam hal ini LED akan menyala bila ada arus listrik mengalir dari anoda ke katoda. Pemasangan kutub LED tidak boleh terebalik karena apabila terbalik kutubnya maka LED tersebut tidak akan menyala. Led memiliki karakteristik berbeda-beda menurut warna yang dihasilkan. Semakin tinggi arus yang mengalir pada LED maka semakin terang pula cahaya yang dihasilkan, namun perlu diperhatikan bahwa besarnya arus yang diperbolehkan adalah 10mA-20mA dan pada tegangan 1,6V – 3,5 V menurut karakter warna yang dihasilkan. Apabila arus yang mengalir lebih dari 20mA maka LED akan terbakar. Untuk menjaga agar LED tidak terbakar perlu kita gunakan resistor sebagai penghambat arus.
Arah arus konvensional hanya dapat mengalir dari anoda ke katoda. Untuk
pemasangan LED pada board mikrokontroller Anoda dihubungkan ke sumber
tegangan dan katoda dihubungkan ke ground.
Di dalam LED terdapat sejumlah zat kimia yang kaan mengeluarkan cahaya
jika elektron-elektron melewatinya. Dengan mengganti zat kimia ini
(doping), kita dapat mengganti panjang gelombang cahaya yang
dipancarkannya, seperti infra red, hijau/biru/merah, dan ultraviolet.
4. Motor DC
Pada
dasarnya beberapa aplikasi yang menggunakan motor DC harus dapat
mengatur kecepatan dan arah putar dari motor DC itu sendiri. Untuk dapat
melakukan pengaturan kecepatan motor DC dapat menggunakan metode PWM
(Pulse Width Modulation) sedangkan untuk mengatur arah putarannya dapat
menggunakan rangkaian H-bridge yang tersusun dari 4 buah transistor.
Tetapi dipasaran telah disediakan IC L293D sebagai driver motor DC yang
dapat mengatur arah putar dan disediakan pin untuk input yang berasal
dari PWM untuk mengatur kecepatan motor DC.
Sebelum membahas tentang IC L293D, alangkah baiknya jika kita
membahas driver motor DC menggunakan rangkaian analog terlebih dahulu.
Jika
diinginkan sebuah motor DC yang dapat diatur kecepatannya tanpa dapat
mengatur arah putarnya, maka kita dapat menggunakan sebuah transistor
sebagai driver. Untuk mengatur kecepatan putar motor DC digunakan PWM
yang dibangkitkan melalui fitur Timer pada mikrokontroler. Sebagian
besar power supply untuk motor DC adalah sebesar 12 V, sedangkan output
PWM dari mikrokontroler maksimal sebesar 5 V. Oleh karena itu digunakan
transistor sebagai penguat tegangan. Dibawah ini adalah gambar driver
motor DC menggunakan transistor.

Sedangkan
jika diinginkan sebuah motor DC yang dapat diatur kecepatan atau arah
putarnya maka digunakanlah rangkaian H-brigde yang tersusun dari 4 buah
transistor.

5. Motor Driver L293D
IC
L293D adlah IC yang didesain khusus sebagai driver motor DC dan dapat
dikendalikan dengan rangkaian TTL maupun mikrokontroler. Motor DC yang
dikontrol dengan driver IC L293D dapat dihubungkan ke ground maupun ke
sumber tegangan positif karena di dalam driver L293D sistem driver yang
digunakan adalah totem pool. Dalam 1 unit chip IC L293D terdiri dari 4
buah driver motor DC yang berdiri sendiri sendiri dengan kemampuan
mengalirkan arus 1 Ampere tiap drivernya. Sehingga dapat digunakan untuk
membuat driver H-bridge untuk 2 buah motor DC. Konstruksi pin driver
motor DC IC l293D adalah sebagai berikut.
Konstruksi Pin Driver Motor DC IC L293D:

Fungsi Pin Driver Motor DC IC L293D:
-Pin EN (Enable, EN1.2, EN3.4) berfungsi untuk mengijinkan driver menerima perintah untuk menggerakan motor DC.
-Pin In (Input, 1A, 2A, 3A, 4A) adalah pin input sinyal kendali motor DC
-Pin Out (Output, 1Y, 2Y, 3Y, 4Y) adalah jalur output masing-masing driver yang dihubungkan ke motor DC
-Pin
VCC (VCC1, VCC2) adalah jalur input tegangan sumber driver motor DC,
dimana VCC1 adalah jalur input sumber tegangan rangkaian kontrol dirver
dan VCC2 adalah jalur input sumber tegangan untuk motor DC yang
dikendalikan.
-Pin
GND (Ground) adalah jalu yang harus dihubungkan ke ground, pin GND ini
ada 4 buah yang berdekatan dan dapat dihubungkan ke sebuah pendingin
kecil.
5. Rangkaian dan Prinsip Kerja [kembali]

Pada sensor suhu lm35 inputan nya berupa analog, yaitu besarnya nilai suhu yang dideteksi. Pin output dari LM35 di sambungkan ke pin A0 yang merupakan inputan dari arduino.
Output dari Arduino yaitu pada pin 2 yang disambungkan ke Red LED, pin 9 dan 10 disambungkan ke IN1 dan IN2 dari Driver Motor L293D dan OUT1 dari driver motor dihubungkn ke Fan DC dan pin 4 disambungkan ke Green LED.
Pada rangkaian terdapat Driver motor yang berfungsi sebagai pengerem motor, dimana jika IN1 di beri logika HIGH dan IN2 diberi logika LOW maka Fan DC akan menyala,sedangkan jika IN1 di beri logika LOW dan IN2 diberi logika LOW maka Fan DC tidak akan menyala.
Bila diberikan suhu >=40 C maka Fan DC akan berputar dan Green LED akan menyala. Sedangkan bila diberi suhu<=40 C maka Fan DC tidak berputar dan Red LED akan menyala.
Pada rangkaian juga terdapat rangkaian reset yang berguna merefresh rangkaian untuk memastikan semua fungsi berjalan dengan semestinya.
6. Listing Program [kembali]
#define TempPin A0 //mendeklarasi pin sensor suhu lm35
float TempValue; //variabel nilai suhu yang digunakan
float TempCel; //variabel nilai suhu dalam satuan celcius
int LEDMerah=2; //pin LED merah pada arduino
int LEDHijau=4; //pin LED hijau pada arduino
int motorPin1=9; //pin motor pin 1 pada arduino
int motorPin2=10; //pin motor pin 2 pada arduino
void setup() {
Serial.begin(9600); //untuk mengeset kecepatan transmisi data
pinMode(LEDMerah,OUTPUT); // menginisialisai pin input atau output
pinMode(LEDHijau,OUTPUT); // menginisialisai pin input atau output
pinMode(motorPin1,OUTPUT); // menginisialisai pin input atau output
pinMode(motorPin2,OUTPUT); // menginisialisai pin input atau output
}
void loop()
{
TempValue = analogRead(TempPin); //baca input pada pin analog 0
TempCel = TempValue * 0.48828125; //rumus kalibrasi suhu ke celcius
if (TempCel>=40.0) //kondisi yang diinginkan
{
digitalWrite(LEDMerah,LOW); // menulis nilai digital
digitalWrite(LEDHijau,HIGH); // menulis nilai digital
digitalWrite(motorPin1, HIGH); // menulis nilai digital
digitalWrite(motorPin2, LOW); // menulis nilai digital
}
else //kondisi selain kondisi if diatas
{
digitalWrite(LEDMerah,HIGH); // menulis nilai digital
digitalWrite(LEDHijau,LOW); // menulis nilai digital
digitalWrite(motorPin1,LOW); // menulis nilai digital
digitalWrite(motorPin2,LOW); // menulis nilai digital
}
}
7. Flowchart [kembali]

8. Link Download [kembali]
Rangkaian Simulasi
Program Arduino
Video Simulasi

Komentar
Posting Komentar